Robot delta tích hợp bàn tay mềm cầm nắm linh động nhiều đối tượng vật thể
Xuất xứ
Việt Nam
Lĩnh vực áp dụng
☑ Cơ khí
Mức độ phát triển
☑ Đã thương mại hóa
Thông số kỹ thuật & Vận hành
Mô tả nguyên lý hoạt động
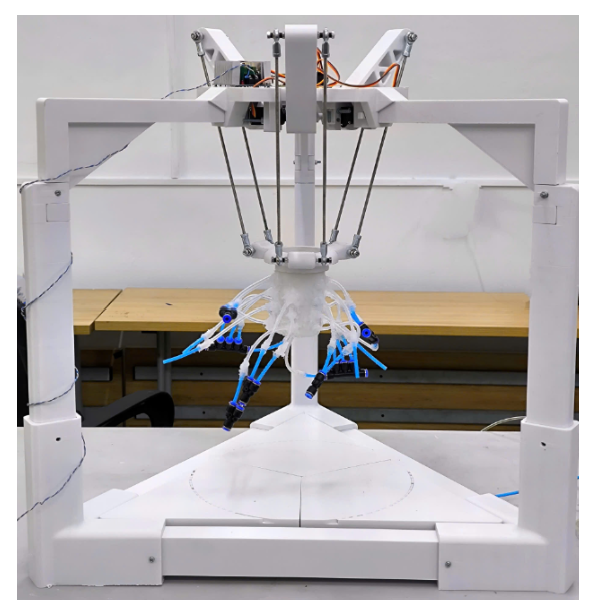
Thiết bị là một hệ thống tay gắp robot mềm sử dụng cấu trúc khí nén đàn hồi để tạo lực bám lên vật thể. Cơ cấu gắp gồm nhiều phần tử mềm dạng màng hoặc “bubble” được bố trí quanh vùng tiếp xúc nhằm phân bố lực đều lên bề mặt vật thể. Khi cấp áp suất khí nén, các phần tử mềm biến dạng và ôm sát vật thể, giúp tăng diện tích tiếp xúc và tạo khả năng bám chắc mà không gây hư hại. Hệ thống phù hợp cho việc thao tác các vật thể có hình dạng phức tạp, bề mặt trơn hoặc dễ vỡ như trái cây, thực phẩm, linh kiện điện tử và vật liệu mềm. Robot được tích hợp trên cơ cấu delta robot tốc độ cao, cho phép thực hiện thao tác gắp – đặt với độ chính xác và tính linh hoạt cao trong các hệ thống tự động hóa hiện đại.
Ưu điểm & Giá bán
Ưu điểm nổi bật
- Khả năng gắp các vật thể mềm, dễ vỡ mà không gây hư hỏng bề mặt - Phân bố lực tiếp xúc đồng đều nhờ cấu trúc mềm khí nén - Tự thích nghi với nhiều hình dạng và kích thước vật thể khác nhau - Độ an toàn cao khi tương tác với sản phẩm và con người - Giảm yêu cầu về độ chính xác vị trí so với tay gắp cứng truyền thống - Trọng lượng đầu gắp nhẹ, phù hợp với robot tốc độ cao - Tăng hiệu quả trong các hệ thống tự động hóa và dây chuyền sản xuất thông minh - Dễ dàng thay đổi hoặc mở rộng thiết kế cho nhiều ứng dụng khác nhau - Hoạt động linh hoạt trong các lĩnh vực thực phẩm, y sinh và công nghiệp điện tử - Giảm nguy cơ trượt hoặc làm biến dạng vật thể trong quá trình thao tác.


.jpg)




.png)




.jpg)
.jpg)



